
Catchup post
I know, I'm terrible at keeping up to date on these blog posts. What usually happens is there's something I want to post but don't want to take the time to do it right now and it gets permanently stuck in my queue of stuff to do. Then I want to post about something else but don't want to go out of order. Then it gets to be 9 months later and I post a large backlog of things. This is another one of those posts. After Defcon and Robogames last year, Joe and I were pretty tired of working on projects so we took some time off to do some non-project related things. It's a lot easier to get projects done when you're in college and only have to be at school 15-20 hours a week versus having full time job and obligated for 40+ hours a week. However, it's also nice being able to afford things rather than being stuck with a shoestring budget. I guess it's the old catch-22 of having enough time or enough money, never both. To celebrate my minimum spare time, I decided to remake the Tournament Software I use to run the robot tournaments with WPF (instead of PHP). The initial reasoning behind doing it in PHP was that was what I was most familiar with and that I wanted people in the pits to be able to look at the brackets, etc over wi-fi without having to bug me. However, that aspect never got used and the software was hard to work with if there was any problem whatsoever (entered match wrong, or someone shows up late). I've wanted to learn WPF for a while, and this was a good excuse to have a project to do that with.
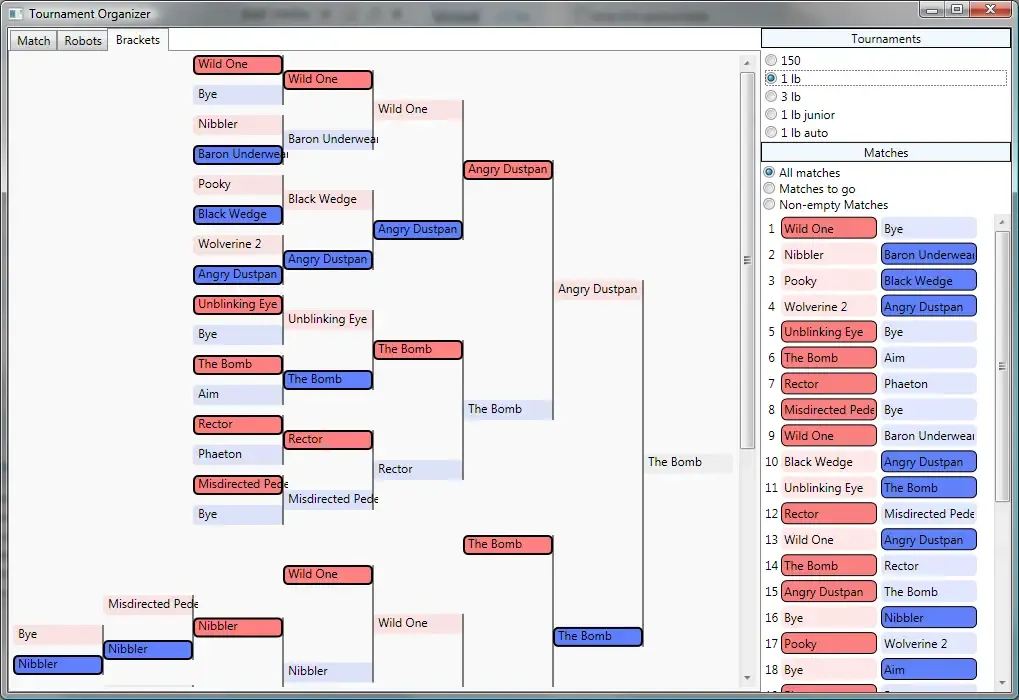 Tournament Organizer in WPF
Tournament Organizer in WPF
The new program is a lot easier to run, and the data is a lot more manageable. As a first WPF project it turned out pretty good, even though I'm not doing enough stuff the "WPF way" and didn't accomplish all of the goals I had for it, namely the ability to integrate in with video mixing software so that the matches could be recorded and high-quality overlays for who's fighting and who's next. I must say though, WPF is nice, and LINQ is even better. I used the software successfully at the CSUS event "Smackdown in Sactown" in April, and again at Robogames in June after making a few changes to support multiple brackets, among other things. Joe and I were kind of burned out of combat robots, so we didn't enter any. Both Emsee Fry Pants and Big Bloom were out of commission, and we didn't want to rebuild them.
Instead of working on another combat robot, we decided to focus our efforts on this years Defcon robot. We decided that it would be a good fit to have the shooting gallery event from Defcon at Robogames and suggested it to Judge Dave. He agreed and we decided to host the event by making the arenas for it and organizing the matches. Unfortunately, in doing so, we ran out of time to finish the gun before Robogames. Instead of doing a half-assed job with the arena and the gun, we decided that it would be better just to get the arena built properly and relax a little bit on the weeked, so we ended up just hosting the event and not competing in it. Part of the problem with the gun is we got a late start on the design process. We are trying to address all of the problems from last years gun, and the biggest one was inaccurate pan/tilt. To address this, we bought some stepper motors to replace the servos. The second was the cardboard facade, which is being addressed by a frame made of a non-cardboard material. The manufacturing of the frame was delayed a while, and by the time the pan/tilt was fully assembled, there was only a few weeks left until the competition. And then there was still the matter of creating another custom hopper for firing and mounting all of the electronics. All of the delays added up to us not finishing it by Robogames. However, it gave us a big head start instead of doing the same thing before Defcon. And believe me when I say it, this years gun will be really impressive.
However, in the mean time, we decided to do a smaller projects with less pressure. One of which is a autonomous slot car. Basically it is a car that can decide for itself how fast to go around the track based on an accelerometer measuring the cornering g-force. Joe sent of a while ago to have a pcb made for it, and after diagnosing and fixing a problem on it (the transistor was in the wrong place) got it working. This last weekend we took it down to Fast Track Hobby and tested it out to see how well it worked. For the initial prototype, we decided it would only react to changes and see how well it worked. As it turns out, the car needs to be able to memorize the course and be able to react before the course changes (or add a camera and detect it early; the former sounds easier though). It was able to successfully navigate the track without flying off and slowing down on the corners and speeding up on the straightaways, however we needed to turn the max speed down in order to have it not fly off on the first sharp corner after a long straightaway. We took some pictures of the course and the autonomous slot car, as well as some video
On another weekend, we decided to measure how fast Joe's Corvette was by creating a G-Meter. Instead of creating something fancy, we decided to just use the sample development board for the development kit we got for free (plus shipping and handling) for a freescale microcontroller that happened to have an accelerometer on it. I created a quick application in WPF on his laptop that parsed the serial data that it was sending and displayed it in a few hours, and we took it out for a spin on the freeways to see what it could do. I've also been listening to podcasts in my car in my commute. Some of the podcasts I listen to are TWiT, .Net Rocks! and NPR's Science Friday. In fact, one of my comments to .NET rocks was read on the show and I got a free mug from it. It's a nice big mug too, that can hold a lot of tea. For those that are coming to this blog from the show, I've done more robots than just the sentry gun below. Also I've been listening to audio books from Audible (one of TWiT's sponsors). Specifically the one I read (or listened to, rather) was The Time Traveler's Wife. It was a really good listen, and I hear they are making a movie based on it which I'd be curious to see how it turns out. At least Will Smith isn't in it, since he has a good habit of being in movies that bastardize the originals they are based on (iRobot, I am legend, Wild Wild West, and to some degree Hancock) and make them into more mainstream movies but missing out on the point of the originals. One of the problems with listening to audio books though is getting behind in the podcasts. That book was 18 hours worth, and it caused me to get around 2 weeks behind. With taking a day of vacation and 2 sick days off between then and now, it's made catching that much harder. This is the end of my catchup post. I've created a Twitter account that I've updated somewhat more frequently than this blog. You can follow me on Twitter, and maybe some day I'll get popular and catch up to Kevin Rose. I could also win the lottery and become a super-millionaire. Also, I'm hosting some videos from Robogames 2008 on my website. Right now it's mainly high-speed (aka slow motion, like they do on MythBusters), but the compilations on the bottom right are pretty good.